|
Stephen Ajemian |
Richard Hamilton |
John Truelove |
Mike Poston |
Abdullah Celik, Graduate
Advisor
acelik@jhu.edu
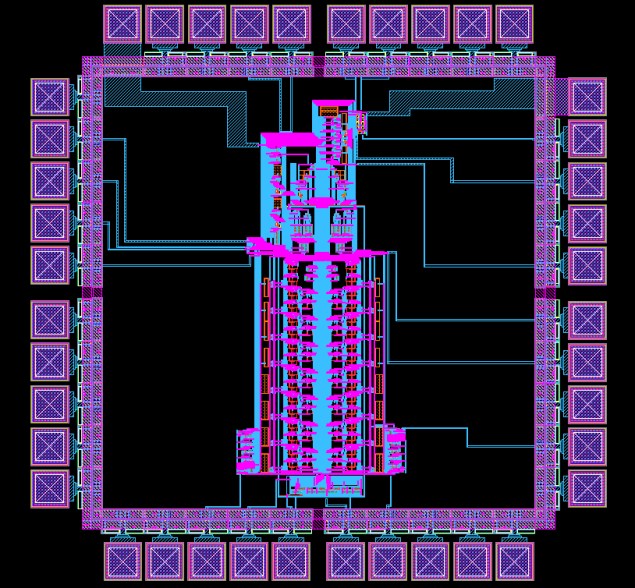
Adaptive Delta Modulator Layout within Padframe
Delta Modulation (DM) is an analog-to-digital conversion used for transmitting analog signals by simply transmitting the difference of an input signal to a reference signal. This difference, as determined by a comparator, is represented by a "0" or a "1", which in this implementation is 0 V and 3 V respectively. A 0 V comparator output indicates that the input signal is less than the approximated signal, whereas a 3 V output indicates that the input signal is greater than the approximated signal. The reference signal consists of the sum of all previous differences between these two voltage signals. However, a significant issue exists in using delta modulation for the encoding of analog signals. The DM is unable to track rapid changes in the amplitude of the input signal giving a distorted demodulated signal. Should an input signal vary rapidly over time, slope overload occurs. As the modulated signal is transmitted and recovered, it will demonstrate large amplitude variations from the input signal. A solution to this slope overload issue is an adaptive delta modulator (ADM). In this implementation of an ADM, slope overload is eliminated by using digital logic to adjust the step size of the integrator used to construct the reference voltage signal. By using previous values of the differences between the two voltage signals, the digital logic will increase or decrease the step size to provide more accurate tracking of the input voltage signal.

The following table outlines the pin connections for our ADM circuit. Depending on the input signal, certain values must be optimized to obtain an accurate output from our circuit. The rail voltages, Vrail+ and Vrail-, are the basic building blocks of the integrator used to track the input signal. These values are the values that are ampified and fed back to the comparator. Values for these voltages are signal dependent. Other signal dependent values are the clock input to the cicuit, and the bias voltage for the low pass filter. For the clock input, one must consider the frequency of the input signal. For our simulations, we sampled the input at about 40 times the Nyquist rate. (Input frequency x 2) Therefore, in order to obtain useful output, one must choose a clock speed appropriate to the input signal so as to achieve accurate resolution in the output signal.
|
1 |
Demodulator Integrator Output |
40 |
Integrator Positive Rail Voltage (V+) |
|
2 |
|
39 |
Integrator Negative Rail Voltage (V-) |
|
3 |
Demodulator Final Output (Vout) |
38 |
|
|
4 |
Demodulator Low-Pass Filter Bias V |
37 |
Demodulator CNT DIR |
|
5 |
Gnd |
36 |
|
|
6 |
|
35 |
|
|
7 |
|
34 |
|
|
8 |
|
33 |
|
|
9 |
Demodulator Sample/Hold Output |
32 |
Demodulator Input (Vin) |
|
10 |
Analog Vdd |
31 |
Clock Input |
|
11 |
Modulator Integrator Output |
30 |
Clock 1 (output) |
|
12 |
Modulator Vin |
29 |
Clock 2 (output) |
|
13 |
|
28 |
Modulator CNT DIR |
|
14 |
|
27 |
|
|
15 |
Vdd (Digital) |
26 |
|
|
16 |
|
25 |
|
|
17 |
Vpup – Inv Amp Bias |
24 |
|
|
18 |
Vpdown – Inv Amp Bias |
23 |
|
|
19 |
Vn – Inv Amp Bias |
22 |
|
|
20 |
Modulator Comparator Output (Vout) |
21 |
|
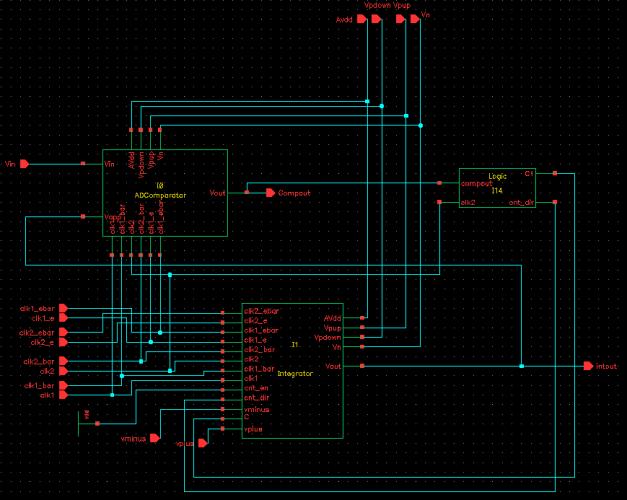
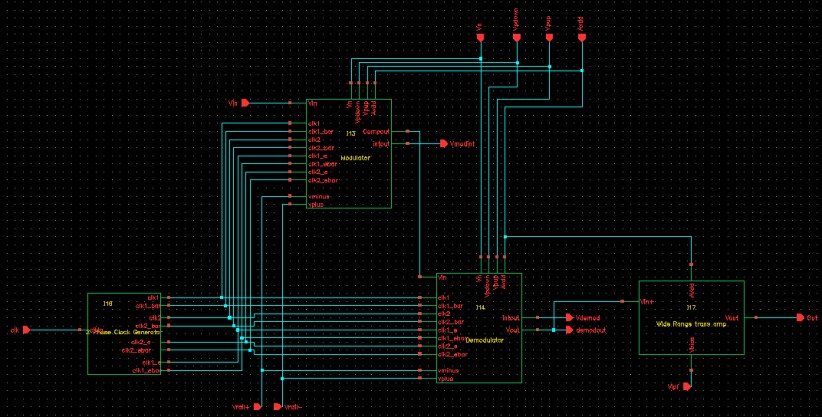
Circuit Overview
Shown below is a high-level schematic
of our circuit. The circuit consists of four basic components: the
two-phase clock generator, modulator, demodulator, and low-pass
filter. The ADM circuit is implemented this way to ensure a modular
design that we could debug piece-wise.
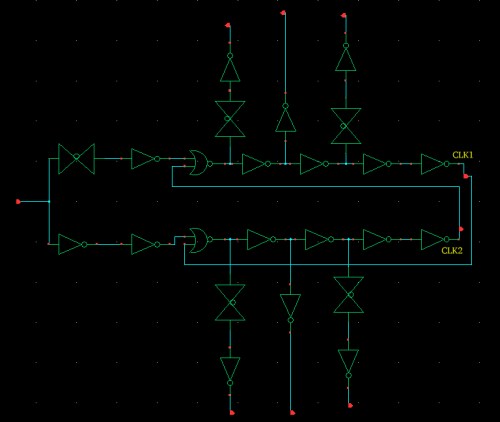
Two-Phase Clock Generator
The two phase clock generator
takes a single clock pulse as input, and generates two
non-overlapping clock pulses, clk1 and clk2, to be used throughout
the cicuit. We also generate a clk1_e and clk2_e, which are earlier
versions of clk1 and clk2. These clock pulses have a falling edge
before clk1 and clk2, respectively. These "early" clocks
are neccessary for our S/H implementations in the various parts of
the ADM circuit. Our comparators and integrators are sample and hold
implementations, and the clock pulses must be generated on chip to
ensure non-overlapping clocks, and dependable "early" clock
pulses. The layout for this implementation is also shown; its
dimensions are about 150x500 lambda.
|
|
|
Modulator
The purpose of the modulator (schematic and
layout shown below) is to generate an output representing the
difference between the input signal (Vin) and the integrator
approximation (Vapp). This output can take one of two forms, either a
logical "0" or "1" represented by gnd and Vdd. If
Vin > Vapp, the comparator will output a 1, and if Vin < Vapp,
a 0 will be sent. This comparator output is only valid during clk2,
after the comparator has sampled both inputs. In addition to being
transmitted, the comparator's output is input into the integrator
where it is used to create the signal approximation. If a 1 is input,
Vapp increases and if a 0 is input Vapp decreases. Vapp is finally
fed back into the comparator where it is used to determine the next
digital output.
|
|
|
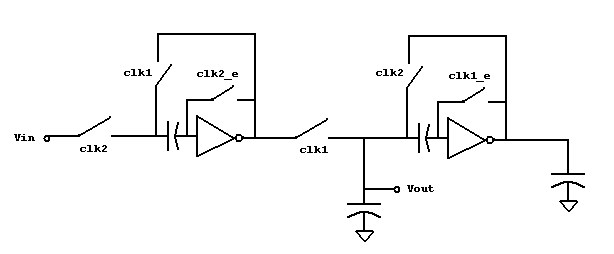
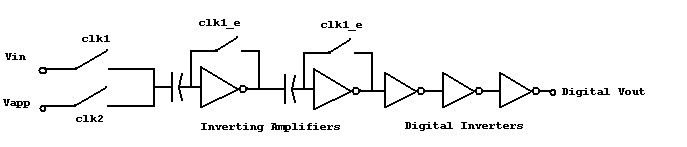
Comparator
We implemented a cascoded S/H comparator
using our non-overlapping two-phase clock pulses as the sample and
hold signals. First, the comparator is reset to a subthreshold offset
voltage using the clk1_e pulse. Next, the clk1 pulse is used to
sample Vin. Since the inverting amplifiers are shorted, the voltage
Vin-Voffset charges at both capacitors. Next, the clk1 pulse is
released and the hold is asserted through clk2. Vapp-Voffset charges
the first capacitor, then is passed through the first inverting
op-amp to charge the voltage Vin-Vapp at the second capacitor. This
voltage is passed through the second inverting op-amp to induce
Vapp-Vin as the output voltage of the second op-amp. This voltage
will be inverted thrice, which means that if Vapp-Vin is positive a
digital 0 will be output and if Vapp-Vin is negative a digital 1 will
be output.
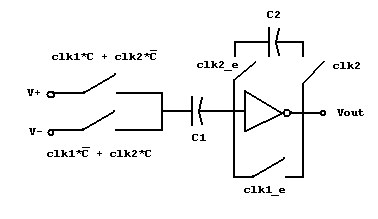
Integrator
For our integrator, we used a similar S/H
implementation. For our voltage precharge we are provided with two
opposite rail voltages. Depending on our comparator value, we will
either precharge the positive or negative rail voltage. We implement
a pass-gate multiplexor with the comparator output selecting the
appropriate rail voltage. The opposite voltage is then sampled, and
inverted through the inverting amp to provide either positive or
negative
feedback. First, the clk1_e signal clears the integrator voltage and
shorts the inverting amp so that when clk1 is asserted, the appropriate
rail
voltage is charged on C1. Next, the clk2_e signal is asserted, which
precharges C2 so that when clk2 is asserted, the opposite rail
voltage passes through the inverting amp and a gain of C1/C2 is added
or
subtraced from the voltage at C2, depending on the value of the
comparator. Clearly, if the value of C1 remains constant, there will
be a constant gain and therefore a constant step size in our
waveform. Additionally the comparator output is only available during
clk2, although we need it during both clock signals to ensure the
correct rail voltage is selected. We resolve both of these issues
using a sequential logic unit.
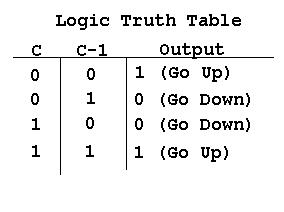
Adaptive Logic Algorithm
|
After experimenting with simulations of several different adaptive logic schemes we realized that the simplest logic scheme works the best. If the comparator value is different from the one immeadiately before it, it means our input signal and our approximation have crossed each other and we need to change the direction of the approximation. In order to minimize over-correction, we want to decrease the step size. Conversely, if our comparator value is the same as the one immeadiately before it, it means that our signals have not crossed and that we want to increase the approximation's step size so as to minimize slope overload. This can be implemented very easily; with a latch to save the previous value of the comparator output and an XNOR gate to check if the current and previous values are equal. |
|
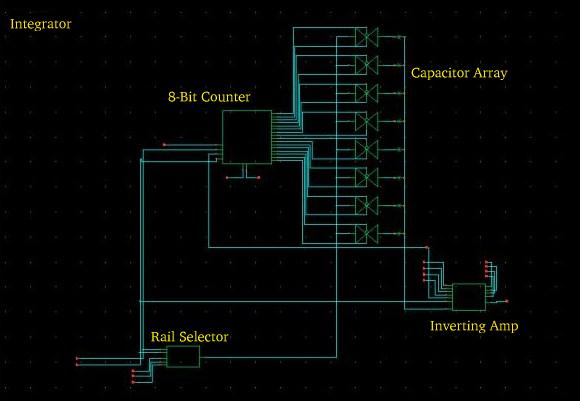
Adaptive Step Size Implementation
We implemented
different step sizes by putting an array of 8 parallel, switched
capacitors in place of C1 in the integrator. To control the switches
to each capacitor we implemented an 8-bit temperature counter, with
each bit in the counter driving a switch to a capacitor. Since the
progression of the temperature counter is 00000001, 00000011,
00000111, ..., we simply pass a count direction bit; if cnt_dir = 1,
each bit takes the value of the next least significant bit and if
cnt_dir = 0, each bit takes the value of the next greater significant
bit. This way, we ensure that the step size will either grow by 1
degree or shrink by 1 degree. Additionally we ensure that the least
significant bit will always equal 1 so that there will always be at
least a unity gain for the step size.
|
|
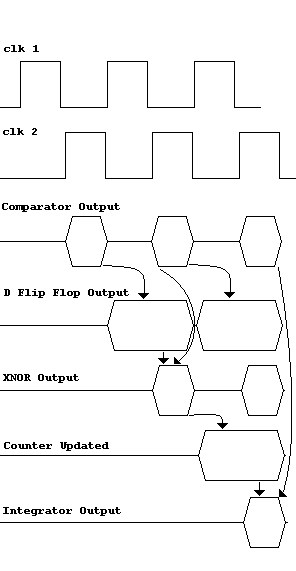
Timing Nuances
|
Finally, we need to connect all of our circuit elements such
that we have all outputs available when they are needed, while being
careful to optimize delay time between the output of the comparator and
the output of the integrator. First, we need to make the output of the
comparator available during both clock cycles, so we immediately input
the comparator output into a D flip flop sampling on clk2. This way, we
have this information available during the entire subsequent clock
cycle. This flip flop gives us a memory unit to input into our XNOR, so
we simply connect the two inputs of the XNOR to the input and output of
the D flip flop. Since the input of the D flip flop is only valid
during the clk2 state, this means that the output of the XNOR gate will
only be valid during the clk2 state. |
|
Demodulator
Our demodulator basically follows the same
circuit implementation of our integrator. The difference is that the
demodulator's integrator takes a digital input off chip, whereas the
modulator uses feedback from the comparator to input to the
integrator. The demodulator integrator will generate the same signal
approximation as the modulator, but it must have additional elements
to fully restore the input signal. We use a S/H element so that the
integrator output is usable during both clock cycles, and not just
clk2. The voltage in the S/H element is then passed to a first-order
low pass filter, with a bias voltage controlled off chip. This
eliminates the high-frequency voltages caused by the integrator
approximation, and thus smoothes demodulated output.
Sample and Hold
The S/H circuit samples the integrator output voltage during the clk2 cycle, and holds this voltage during the clk1 cycle. Because the integrator output is only valid during clk2, we must extend this to both clk cycles to output an accurate representation of the signal. The low pass filter is now able to filter the integrator output over both clock cycles, thus providing a smoother output waveform to closely match the original input signal.|
|
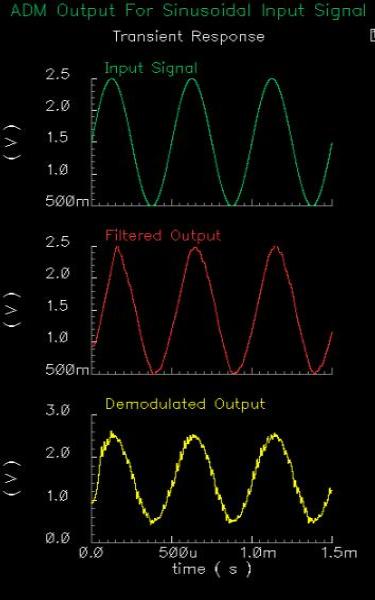
For our first simulation, shown below, we applied a sine wave input of frequency 2 KHz. The input voltage range ran from 0.5 V to 2.5 V, the operating range of our ADM. So, the message signal took the form: m(t) = sin(4000*pi*t) + 1.5. With this 2 KHz input frequency, we chose a sampling frequency of about 167 KHz. (Approximately 42 times the Nyquist sampling rate). We sampled the input signal over several periods, and also included a plot of the demodulated output prior to the low-pass filter.
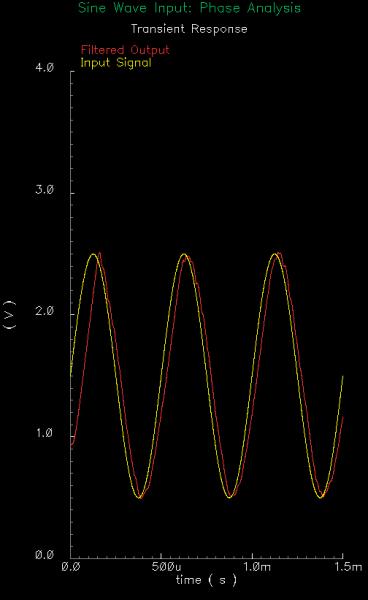
From the filtered output waveform, one can see that the output signal is an accurate approximation of the input signal. The under-approximation that occurs at startup is due to the zero initial condition of the integrator. The integrator must first build up the approximated signal to the input voltage. However, once the approximated signal reaches a value that can accurately track the input signal, it will track it quite closely. The difference in phase of the output signal as compared to the input signal can be attributed to the inherent delay of the ADM circuit. Our implemenation requires a two phase clock for the precharging that must occur within the comparator and integrator, which contributes substantially to the overall delay of the circuit. Essentially, the comparator samples the input during clock cycle 1, and its output is valid during clock cycle 2. This value is then latched for the next clock cycle 1, which is then used by the integrator during clock cycle 2. So, the generation of a valid output to be sent to the demodulator takes two clock cycles. (Based on the input to the two phase clock generator) A plot of the basic sine wave superimposed on the output signal is also included below. From the plot, one can see the minor phase shift between the input and output signals.
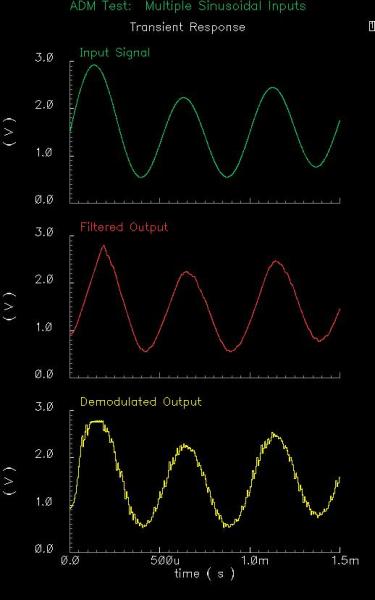
For our second simulation, we applied an input signal consisting of the sum of three sine waves of varying frequency. The input signal took the form of m(t) = sin(4000*pi*t) + sin(3000*pi*t) + sin(2000*pi*t) + 1.5 V. The output waveform is an accurate approximation of the input, as with the case of the basic sine wave.
|
|
|
|
In practice, the demodulator and modulator would not reside on the
same chip. The comparator output will be sent through some channel to
be received by the demodulator, as Delta Modulation is communication
system. In this circuit, the demodulator is included to provide a
glimpse of what the reconstructed signal will look like. The
demodulator will take the output of the comparator from the
modulator, which is either a binary "0" or "1" (0
V or 3 V), and assembles an approximation based solely on this binary
input. Based on the comparator input, the demodulator uses digital
logic to determine if the integrator must adjust the step size of the
integration. (The integrator in the demodulator is different than the
modulator integrator) This is accomplished by connecting more
capacitors in parallel, thus increasing the step size. The integrator
provides eight different step sizes (8 capacitors in parallel), and
these capacitors are switched on or off, depending on the digital
logic.
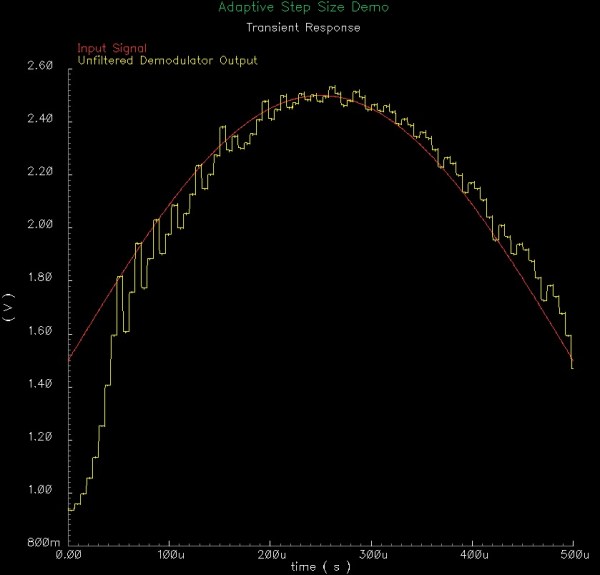
A more comprehensive simulation of the adaptibility of
our ADM is shown below. For this plot, the waveform is the original
sine wave input, zoomed in to the first peak of the waveform. The
startup of the approximation is a very good example of the
adaptibility. One can see that the integrator is trying to "catch
up" with the input waveform, and the step size quickly increases
to the maximum step. As soon as the integrator outputs an
approximation greater than the input signal, the approximation will
climb back down. However, for this descent, the step size will be
decremented because the input signal must be between these two
approximations. The digital logic will also change the step size if
two consecutive comparator outputs are the same. At the peak of the
input waveform, notice that the approximation is oscillating above
and below the input signal. This oscillation will decrement the step
size everytime the comparator output changes, and the approximation
will track the input signal accurately for a slow changing input.
|
|
Lathi, B. P., Modern Digital and Analog Communications Systems, Oxford University Press, 1998.